AWR1443, AWR1243 Evaluation Module
(AWR1443BOOST, AWR1243BOOST) mmWave
Sensing Solution User’s Guide:
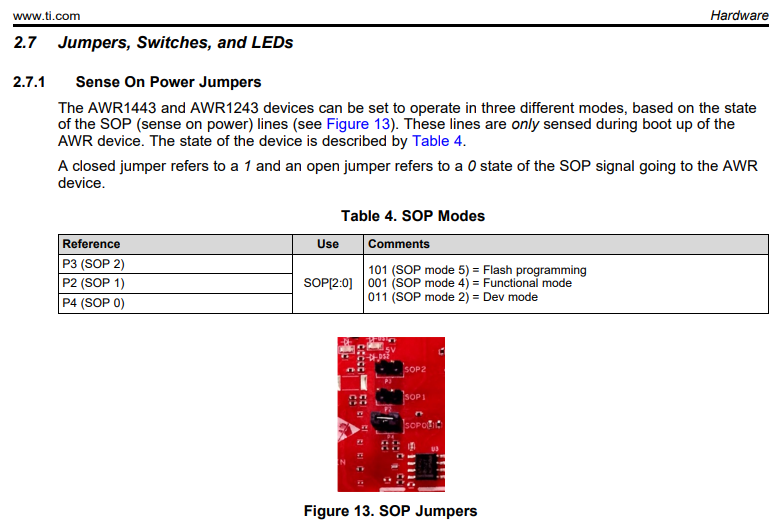
A closed jumper refers to a 1 and
an open jumper refers to a 0 state
of the SOP signal going to the AWR device.
Jumper
101 (Short/Open/Short) = Flash programming
001 (Open/Open/Short) = Functional mode
安裝3.6版會沒有
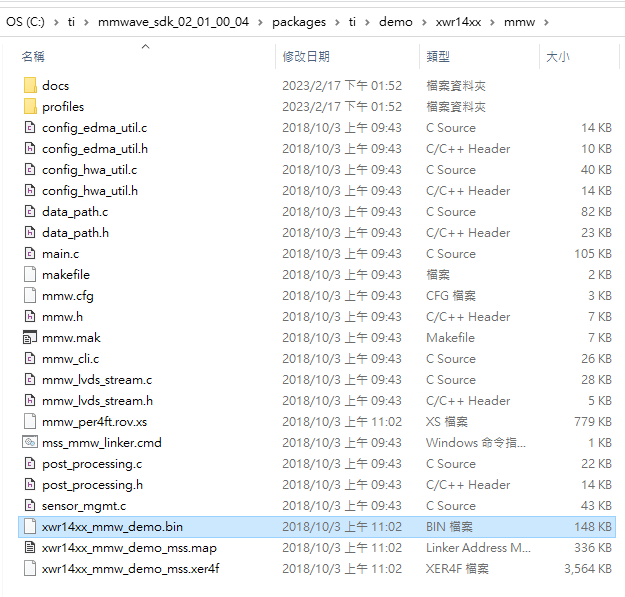
xwr14xx_mmw_demo.bin可以燒錄
AWR1443需要燒錄xwr14xx
mmwave_sdk 3.6最低從
xwr16xx_mmw_demo.bin
無正確的bin檔可以燒錄
AWR1443BOOST
Jumper = 101 (Flash programming)
After changing the SOP mode, power off/on the EVM
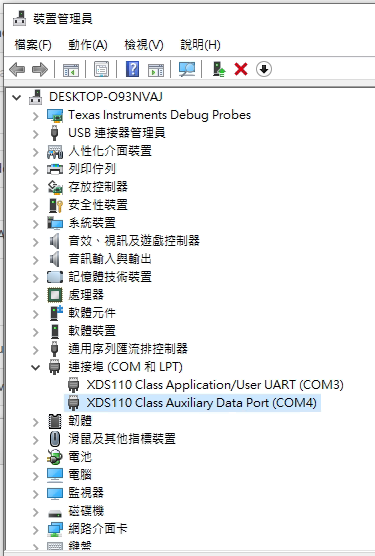
For flashing you will need to use in Uniflash the User Port: – COM3
(裝置管理員中User UART結尾的那一個COM)
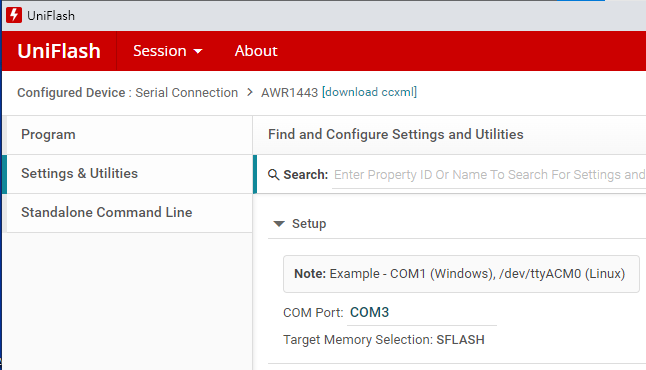
Settings: COM3
Meta image1: xwr14xx_mmw_demo.bin => Load Image
(依個人硬體選擇正確的bin檔)
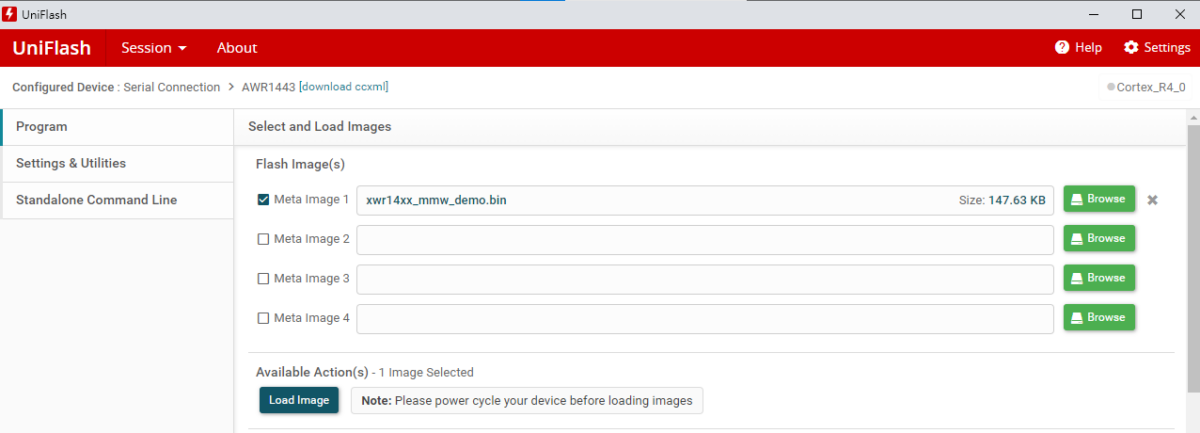
成功的話,Uniflash最底下應該出現
綠色的Program Load completed successfully
未選擇正確bin檔的話,
燒錄會出現Error
就算Program Load completed successfully也無效
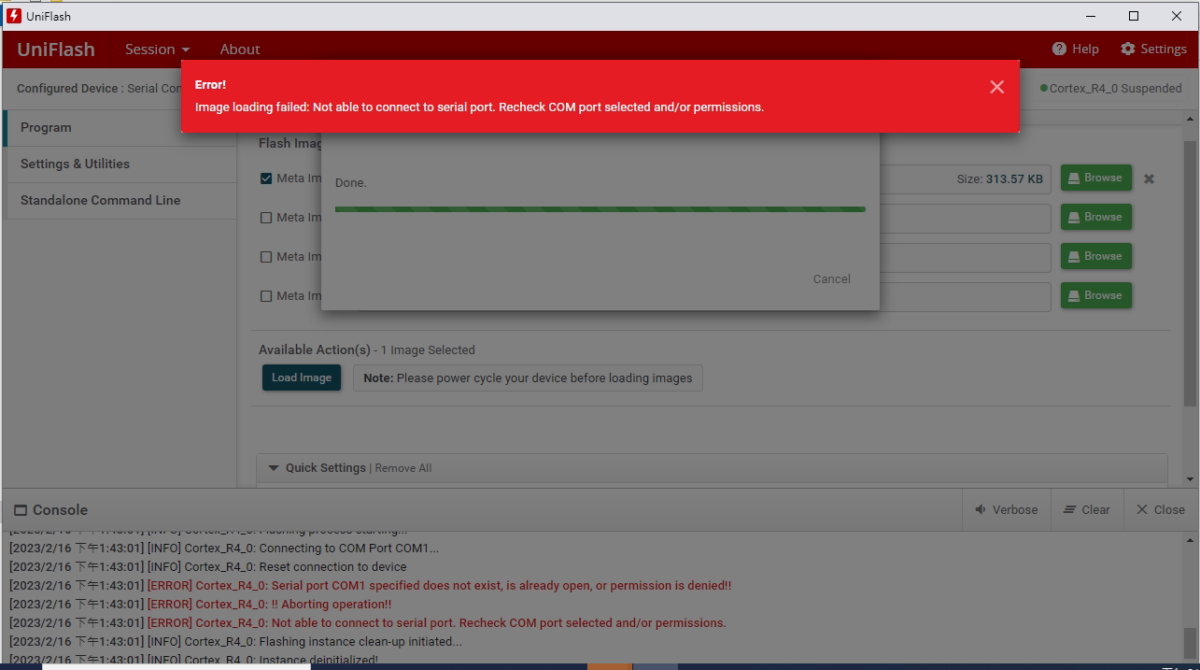
xwr14xx_mmw_demo.bin
After flashing,
change the SOP mode to Functional Mode
(SOP mode 4: 001)
SOP 0 has a jumper,
SOP 1,2 are not connected
After changing the SOP mode,
power off/on the EVM
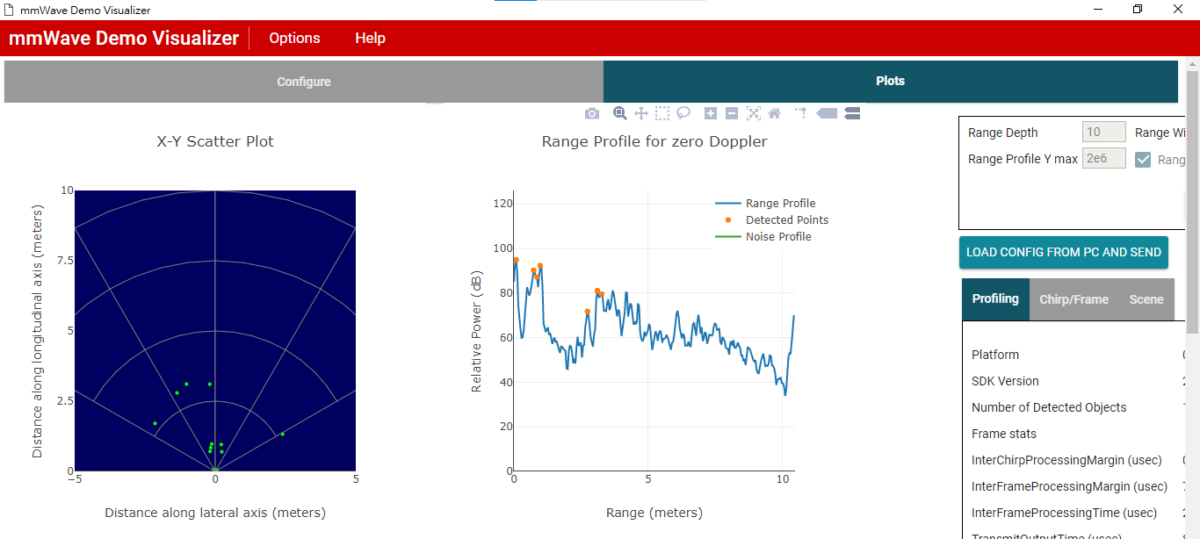
mmWave Demo Visualizer
Platform: xWR14xx
SDK version: 2.1
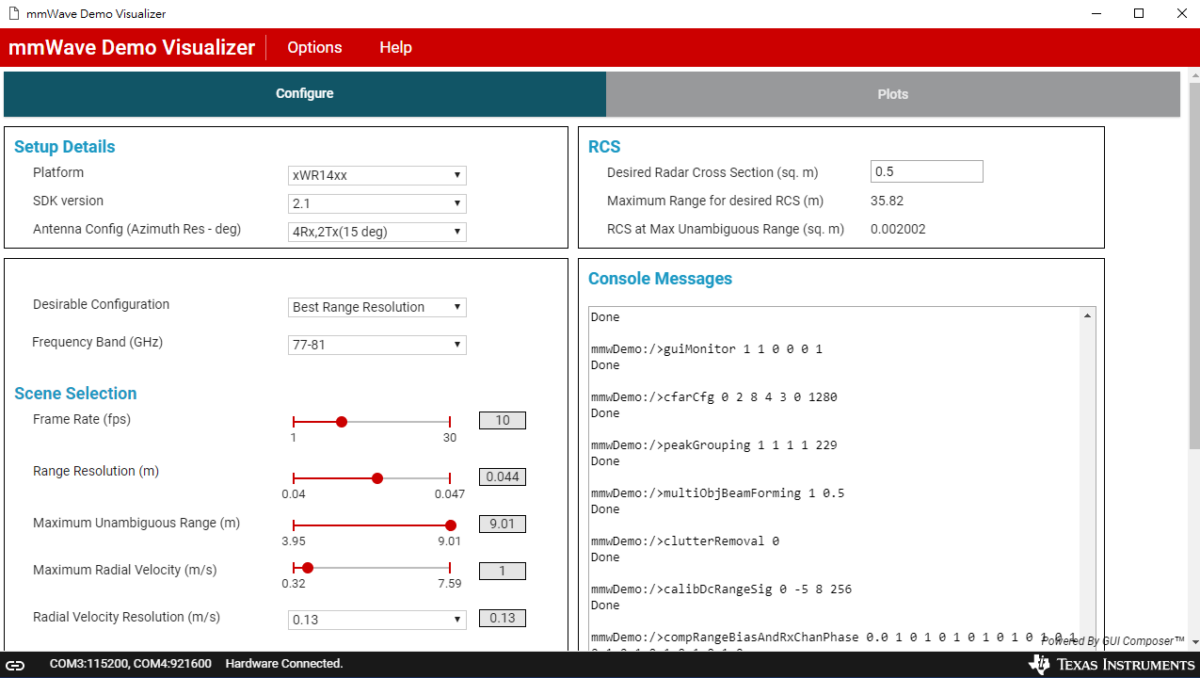
按”SEND CONFIG TO MMWAVE DEVICE”
(左下角: Hardware Connected)
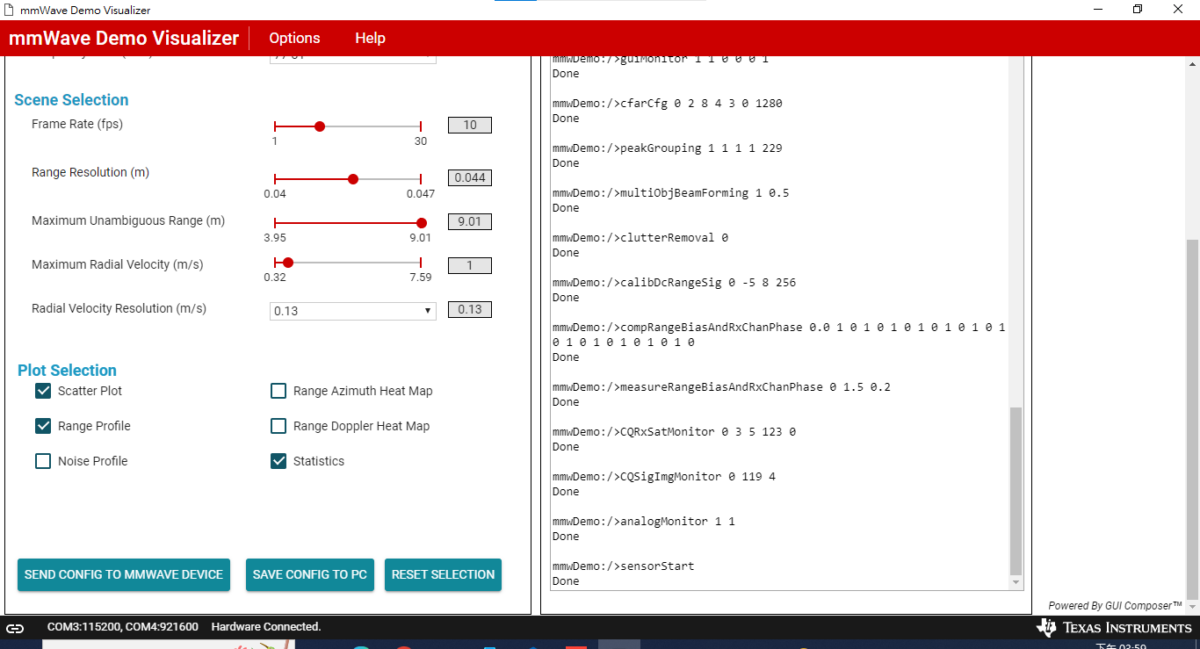
console messages會跑出一堆資訊
點Plots也會有圖:

 # 更改整個檔名(basename,含副檔名); Path.with_stem(“新檔名”) # 更改檔名主體(stem),保留原副檔名 ; Path.with_suffix(“.新副檔名”) # 更改副檔名(只影響最後一個 suffix)")
 ; OrderedDict.fromkeys()")
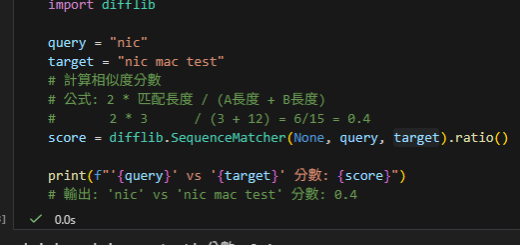
; BM25 (Best Matching 25) ; pip install rank-bm25 ; from rank_bm25 import BM25Okapi")
")
 vs iterrows() ; for row in df.itertuples ( index=False, name=None)")
? from tkinter import Tk, Button, filedialog ; 物件導向避免使用全域變數 ; pandas.read_csv(fpath, skip_blank_lines = True) 可以濾掉空列,Tab , 不定數空白")

 x%5!=0 (!= 不等於)")

近期留言